
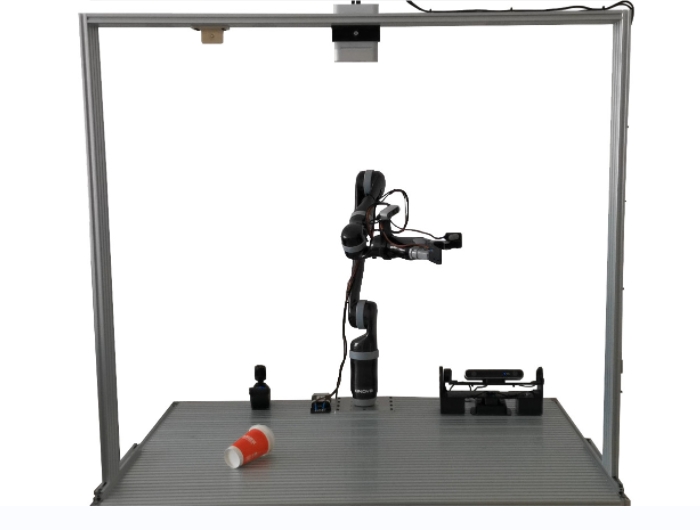
提供平台的软件开发包及相应开发接口供用户二次开发,多种感官融合于一体的机器人开发平台,完全支持ROS
机械臂系统技术参数

| 项目 | 参数 |
|
自由度 |
6 |
|
末端夹具 |
2指 |
|
自重 |
4.4kg |
|
最大负载 (无夹具) |
2.6kg 中档;2.2kg 最高峰/临时峰 |
|
工作半径 |
90 cm |
|
减速类型 |
谐波 |
|
减速比 |
1:100 |
|
最大线性臂速度 |
20cm/s |
|
驱动电压 |
18~29VDC |
|
平均功率 |
25W |
|
最大功率 |
100W |
|
接口 |
USB2.0,有线Ethernet |
|
工作温度 |
-10~ 40℃ |
|
防水性 |
IPX2 |
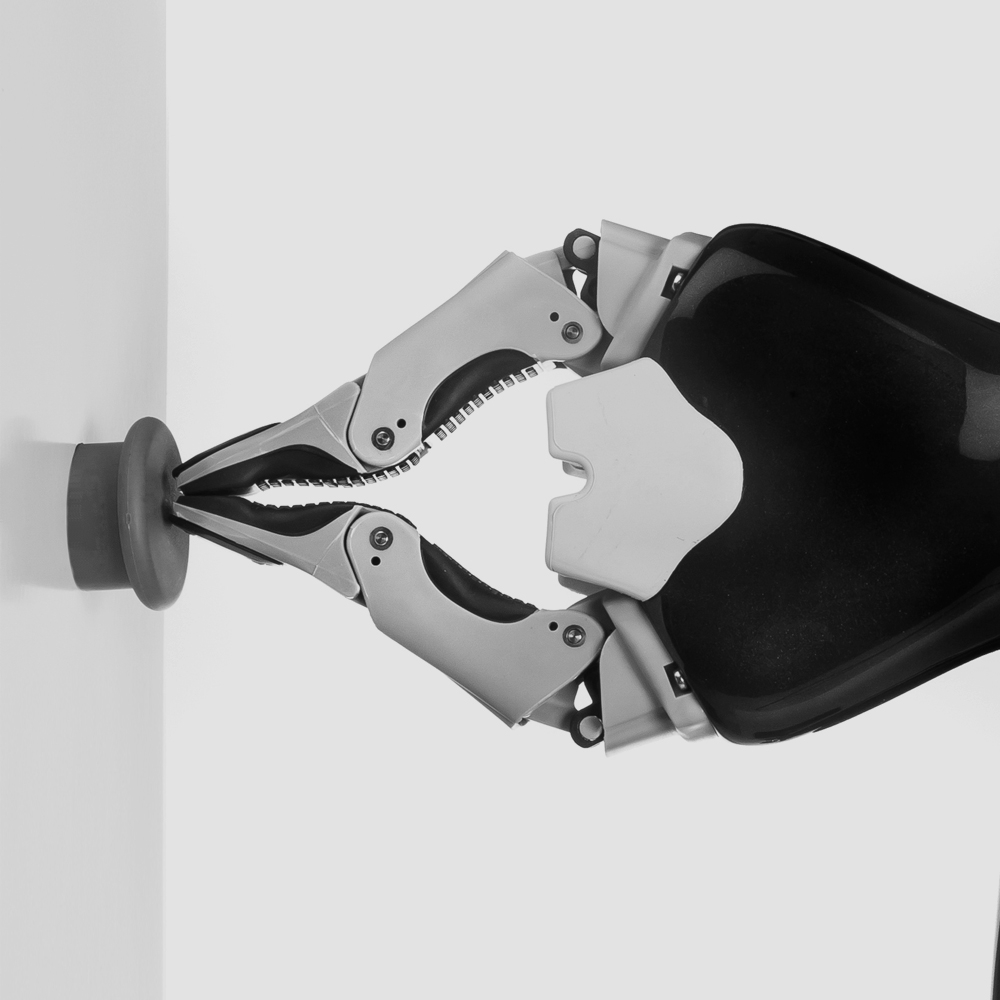
夹持器末端安装类人手指的触觉传感器,完全模拟手指的测力模式,即可精准测量瞬时受力或力量变化
二指灵巧手技术参数
末端夹持器手指数量
2
夹持器重量
556g
夹持器抓取力
40N
夹持器工作半径
750mm
项目
参数
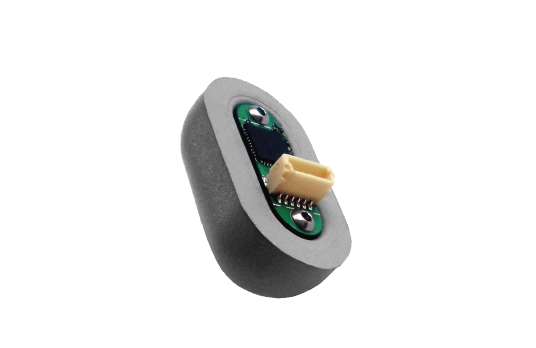
触觉传感器安装在机器人二指夹持器的指尖,进行物体的触觉识别与多模态感知研究
触觉传感器技术参数
重量
0.8g
压力气压测量范围
0~6.8kPa
压力气压分辨率
13Pa
压力气压信号反馈频率
0~1750Hz
压力气压微震动范围
±0.27kPa
压力气压微振动分辨率
0.13Pa
压力气压微振动反馈频率
10~1060Hz
项目
参数
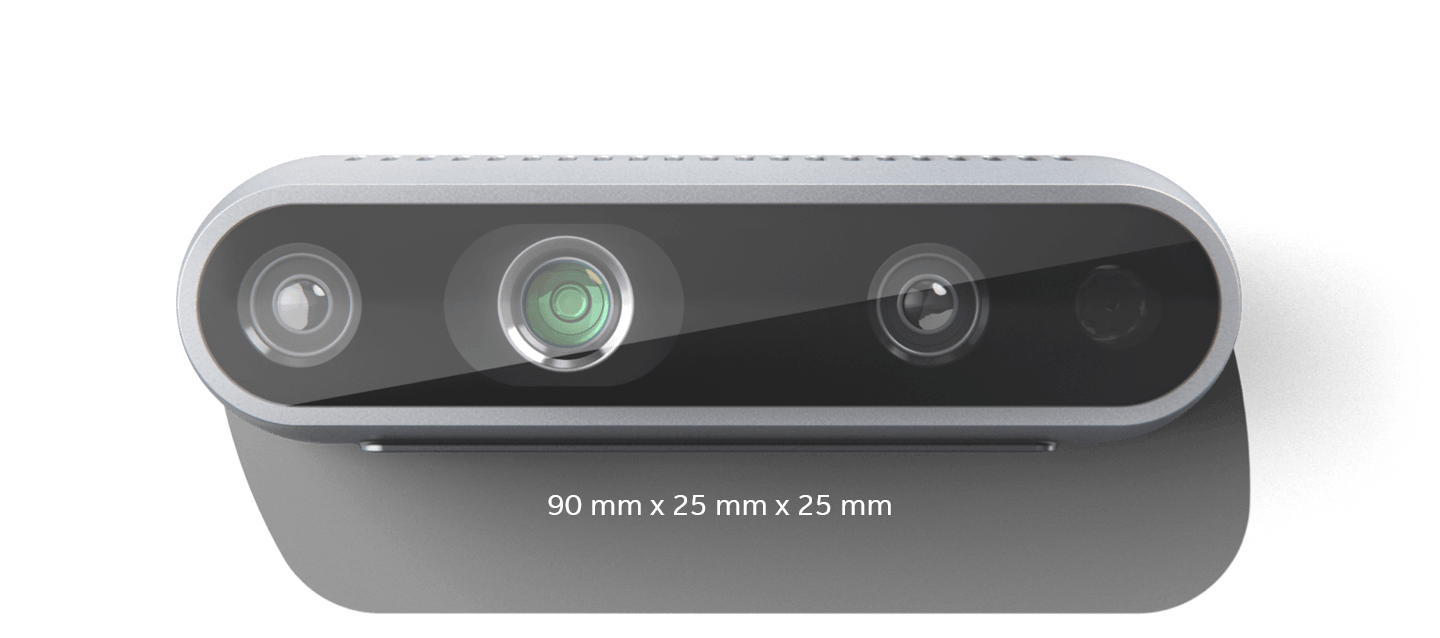
内部手眼系统安装在机械臂的腕部,与机械臂进行固联;提供手眼系统的软件及硬件接口
内部手眼系统技术参数
彩色分辨率与帧率
1920×1080,30fps
深度分辨率与帧率
1280×720,90fps
深度视角
91.2°×65.5°×100.6°
深度距离
图像传感器类型
全局快门,3μm×3μm像素
尺寸(相机外围)
90mm×25mm×25mm
连接器
USB-C 3.1 Gen 1
项目
参数
0.1~10m
外部手眼系统分为方案1(深度摄像头)和方案2(双目摄像头),便于用户开发;
外部手眼系统的坐标系与机械臂坐标系固联,用户可进行简单更改即可快速切换手眼系统;
外部手眼系统能够提供更为广阔的全局视觉与环境数据,在多模态机器人研究中,内部手眼与外部手眼相互配合,内部手眼系统第一视角,外部手眼提供全局视角,进行灵活规划与抓取
外部手眼系统云台(可选配)技术参数
旋转系统尺寸
300mm×72mm×140mm
最大可控转速
30°/s
机械限位范围
水平125°,俯仰125°
可控转动范围
水平120°,俯仰120°
控制精度
0.1°
负载
2.5kg
质量
1350g
项目
参数
外部手眼系统深度摄像头(可选配)技术参数
深度摄像头
100万像素TOF
RGB摄像头
1200万像素,卷帘快门,CMOS传感器
IMU
3D电子加速计,3D电子陀螺仪
尺寸
126mm×103mm×39mm
重量
440g
兼容操作系统
Windows10(不支持S模式),Ubuntu18.04
项目
参数

外部手眼系统双目摄像头(可选配)技术参数
| 项目 | 参数 |
|
立体基线 |
120mm |
|
深度范围 |
0.5~20m |
|
深度格式 |
32位 |
|
6轴姿态精度 |
位置±1mm,方向0.1° |
![]()
软件系统
1. 平台整体支持ROS;2. 开发包支持外部三维环境构建开发;
3. 开发包支持在笛卡尔坐标系下对机械臂进行运动控制;
4. 开发包支持机械臂三维仿真软件,仿真软件含有ODE物理引擎,提供开发接口;
5. 开发包提供外部三维环境构建开发示例代码;
6. 开发包包含手眼标定模块、物体识别与定位模块、机械臂轨迹规划模块等,可进行机械臂手眼系统二次开发;
7. 开发包具有RGB建模模块,支持3D环境构建;
8. 提供软件开发包,可进行机器人系统分布式控制,便于用户二次开发;
9. 提供导纳控制程序模块,并提供完整示例代码供用户使用。

